APM 2.8 V2.8 ArduPilot UAV Flight Controller et Neo - 6M & GPS antenne pliable Stand montant & Power Module & 915Mhz Radio télémesure Transmision
caractéristiques :
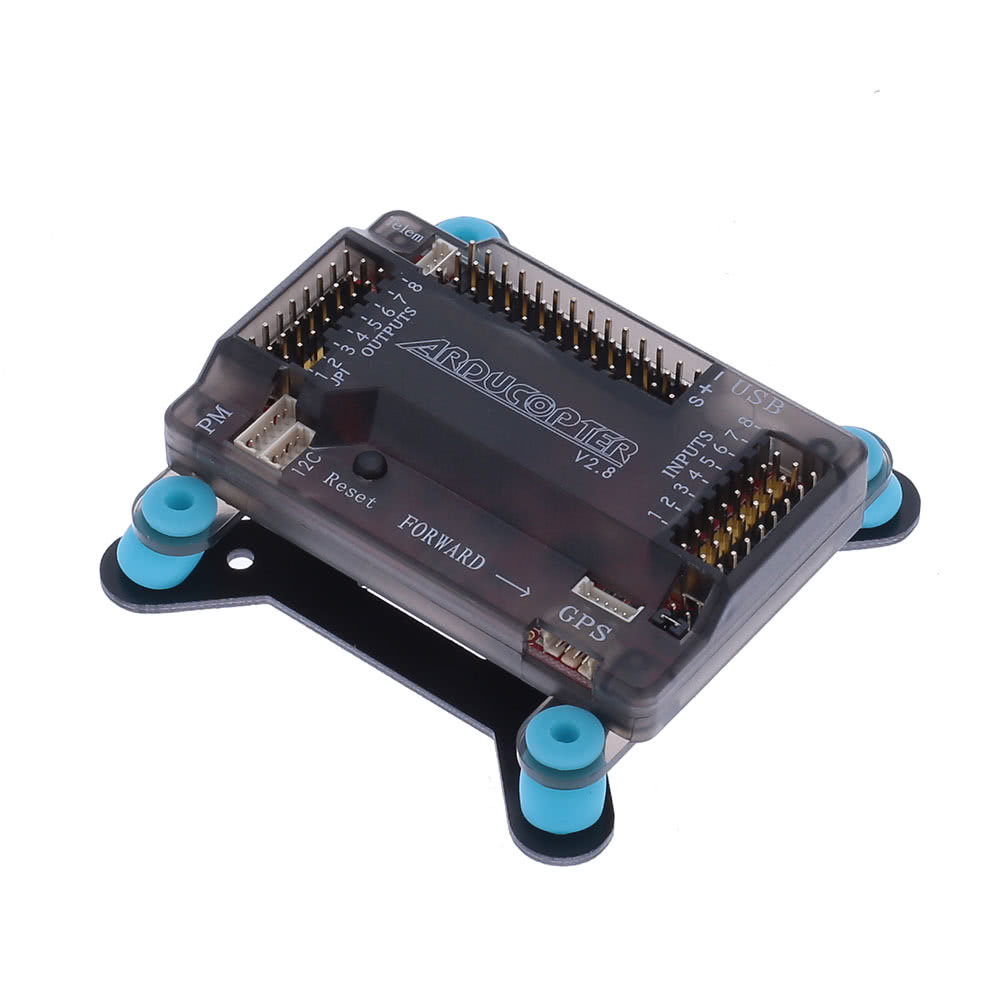
APM2.8 et GPS
Introduction :
c'est le nouveau module de pilote automatique APM 2.8. Les capteurs sont exactement les mêmes qu'avec APM2.5 +, mais cette version ne dispose pas d'un compas à bord, qui rend cette version idéale pour une utilisation avec multicopters et rovers.
l'APM 2.8 est un système de pilote automatique complète de source ouverte et de la technologie de Best-seller qui a remporté le prestigieux concours de Outback Challenge UAV 2012. Il permet à l'utilisateur de transformer des ailes fixes et rotatives ou multirotor véhicule (même les voitures et les bateaux) en un véhicule entièrement autonome ; capables d'exécuter programmé des missions GPS avec points d'intérêts. Disponible avec connecteurs latérales ou supérieurs.
cette révision du Conseil d'administration n'a aucun à bord de la boussole, qui est conçu pour les véhicules (surtout les multicopters et les rovers) où la boussole doit être placée aussi loin de puissance et moteurs sources possible pour éviter toute interférence magnétique. (Sur les aéronefs à voilure fixe il est souvent plus facile de monter APM assez loin les moteurs et les ESCs pour éviter l'interférence magnétique, donc ce n'est pas aussi critique, mais 2,6 APM offre plus de souplesse dans cette position et est un bon choix pour eux, trop). Ceci est conçu pour être utilisé avec le 3DR uBlox GPS avec boussole (voir ci-dessous), afin que l'unité GPS/boussole peut être montée plus loin de sources de bruit que les APM lui-même.
caractéristiques :
Arduino Compatible peut être commandé avec entrée verticale épingles pour fixer les connecteurs verticalement, ou comme les broches d'entrée côté pour glisser vos connecteurs en soit terminer horizontalement
comprend gyroscope à 3 axes, accéléromètre et magnétomètre, ainsi qu'une puce de bord 4 mégaoctets Dataflash
baromètre haute performance pour datalogging automatique
facultatif GPS, uBlox hors Commission LEA - 6 M module avec boussole
l'un des premiers systèmes de pilotage automatique open source utiliser 6 de Invensense DoF accéléromètre/gyroscope MPU-6000
barométrique pression capteur amélioré à MS5611-01BA03, de ATMEGA2560 Measurement Specialties
Atmel et ATMEGA32U-2 jetons pour le traitement et usb fonctions respectivement
GPS caractéristiques :
intégré boussole GPS module
Main puce :
Ublox - 6M avec satellite rapide, la recherche de vitesse et haute précision
Compatible avec port série APM et
port I2C comprend la coque en plastique rond et GPS support
3DR Radio télémesure Kit 915Mhz
Description :
la 3DRobotics 3DR Radio est le moyen idéal pour configurer une connexion de télémesure entre votre APM et une station au sol. Petit, peu coûteux et avec grande plage, la radio de 3DR utilise un firmware open source qui permet de faire des choses qui ne peuvent se faire avec d'autres radios.
Radio caractéristiques :
très petite taille
poids léger (moins de 4 grammes sans antenne)
disponible en 900MHz ou 433MHz variantes
sensibilité du récepteur à-121 dBm
puissance d'émission jusqu'à 20dBm (100mW)
liaison série Transparent
données aérodynamiques tarifs jusqu'à 250 kbit/s
plage d'environ 1 mile
MAVLink protocole cadrage et statut des sauts de fréquence
propagation du spectre (FHSS)
Adaptive time division multiplexing (TDM)
LBT et AFA en faveur Configurable duty cycle
construit en code de correction d'erreur (peut corriger jusqu'à 25 % données bit erreurs)
manifeste portée de plusieurs kilomètres avec un petit omni antenne
peut être utilisé avec un amplificateur bidirectionnel pour encore plus de gamme
Open source firmware
à commandes pour les commandes de radio configuration
RT pour radio à distance configuration
contrôle de flux adaptatif lorsqu'il est utilisé avec APM
basé sur le module radio HopeRF HM-TRP , mettant en vedette un microcontrôleur 7fh Si1000 RF.
MAVLink-OSD V2.0
Introduction
MAVLink-OSD est un projet Arduino fondé et il est entièrement compatible avec l'original MinimOSD.
cette planche peut être utilisée pour CRIUS AIOP et Arduflyer / ArduPilot-Mega.
MAVLink-OSD avec DC/DC abaisseur powersupply pour maximiser l'efficacité sur le système d'alimentation de commutation. Aucun problème de chauffage plus lors de l'utilisation de ce panneau OSD.
Firmware d'OSD par défaut est MinimOSD-Extra, rédigé par Gábor Zoltán.
sur la façon d'utiliser l'outil de Configurateur pour installation fonction OSD : cliquez ici
Comment mettre en place le matériel (original MinimOSD Wiki): cliquez ici
Module de puissance est un moyen simple de fournir votre APM/Arduflyer de la propre puissance d'une batterie LiPo ainsi que la consommation et la batterie tension mesures de courant, tout au long d'un câble de 6 P. Le régulateur à découpage bord sorties 5.3V et un maximum de 3 a partir jusqu'à une batterie LiPo de 7 s.
Remarque : le Module de puissance est uniquement destiné aux APM/Arduflyer, un récepteur RC et accessoires (GPS, radiotélémesure). Il n'est pas conçu pour les servos de puissance. Utilisation de l'avion propre ESC/BEC pour cela.
dispose des caractéristiques matérielles
:
ATMEGA328P microcontrôleur
MAX7456-EUI monochrome affichage à l'écran
régulateur de DC/DC 5V/500mA pour MAX7456-EUI
tension de fonctionnement : 5V(FTDI connector) et 12V (connecteur d'e/s vidéo)
NTSC supporté & PAL
FTDI connecteur
fonctions logicielles :
MAVLink Full protocole soutien
Configurateur graphique outil
APM Arduflyer Power Module V1.0
Introduction :
Module de puissance est un moyen simple de fournir votre APM/Arduflyer de la propre puissance d'une batterie LiPo ainsi que la consommation et la batterie tension mesures de courant,
informations sur le Package :
taille du paquet : 19 * 10 * 5 cm/7,6 * 4 * 2 en
le poids du colis : 190g / 6,7 oz
adhésif robinets paquet
Package List :
1 * APM 2.8 V2.8 ArduPilot
1 *
Neo - 6 M 1 * antenne GPS
1 * Module d'alimentation
1 * 915 Mhz 3DR