

Utiliza el ratón del ordenador para hacer un acercamiento
21.65
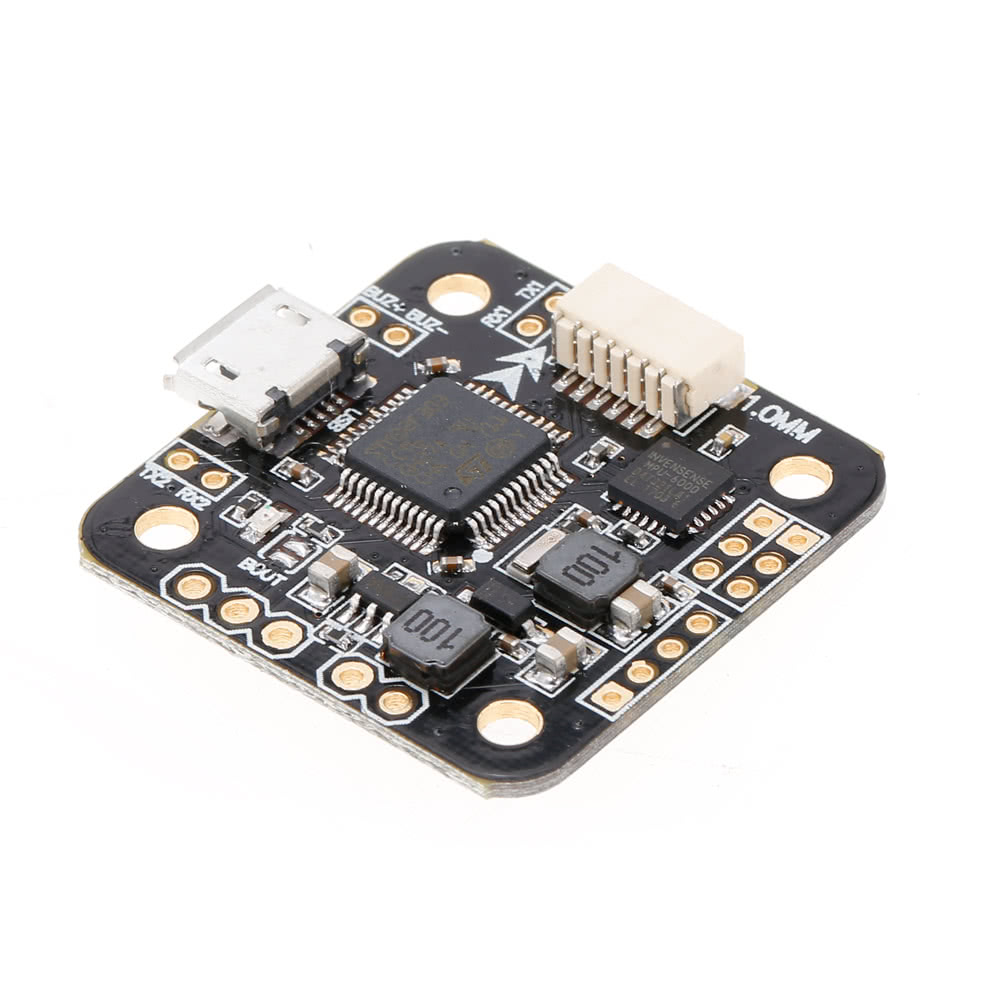
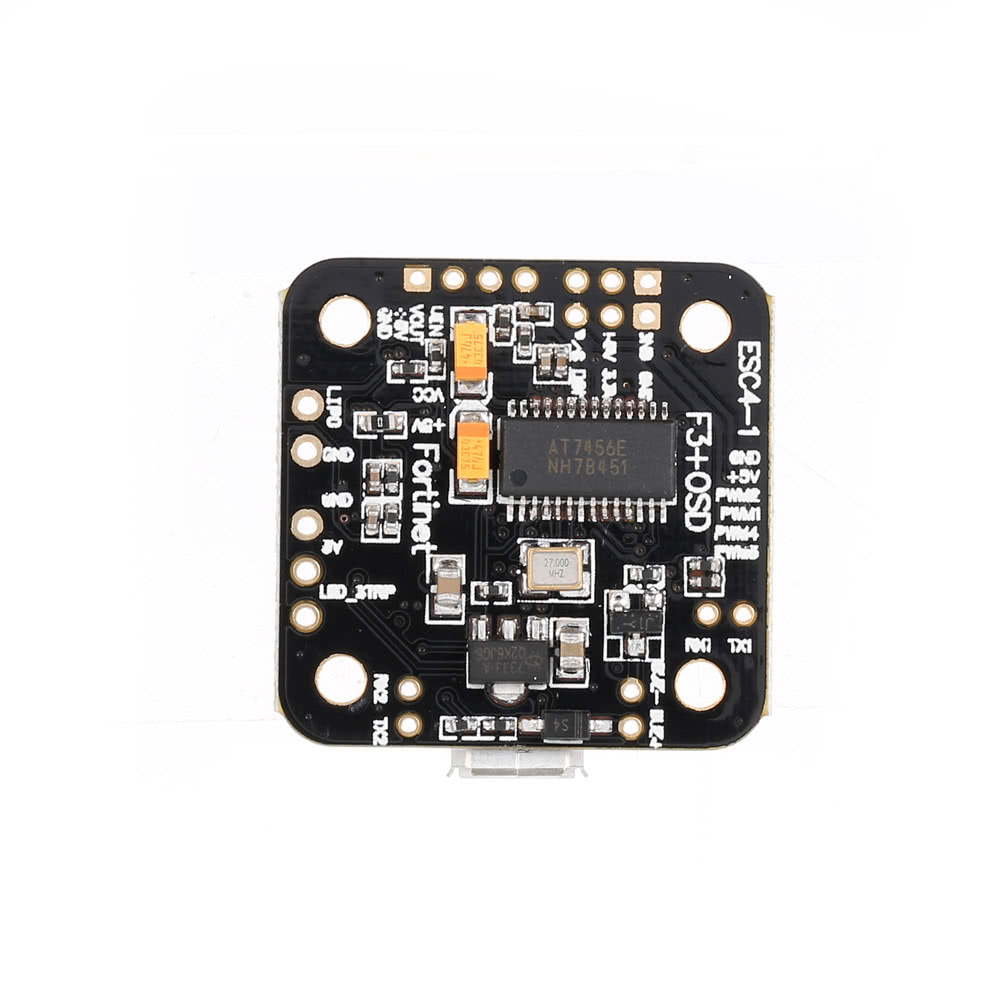
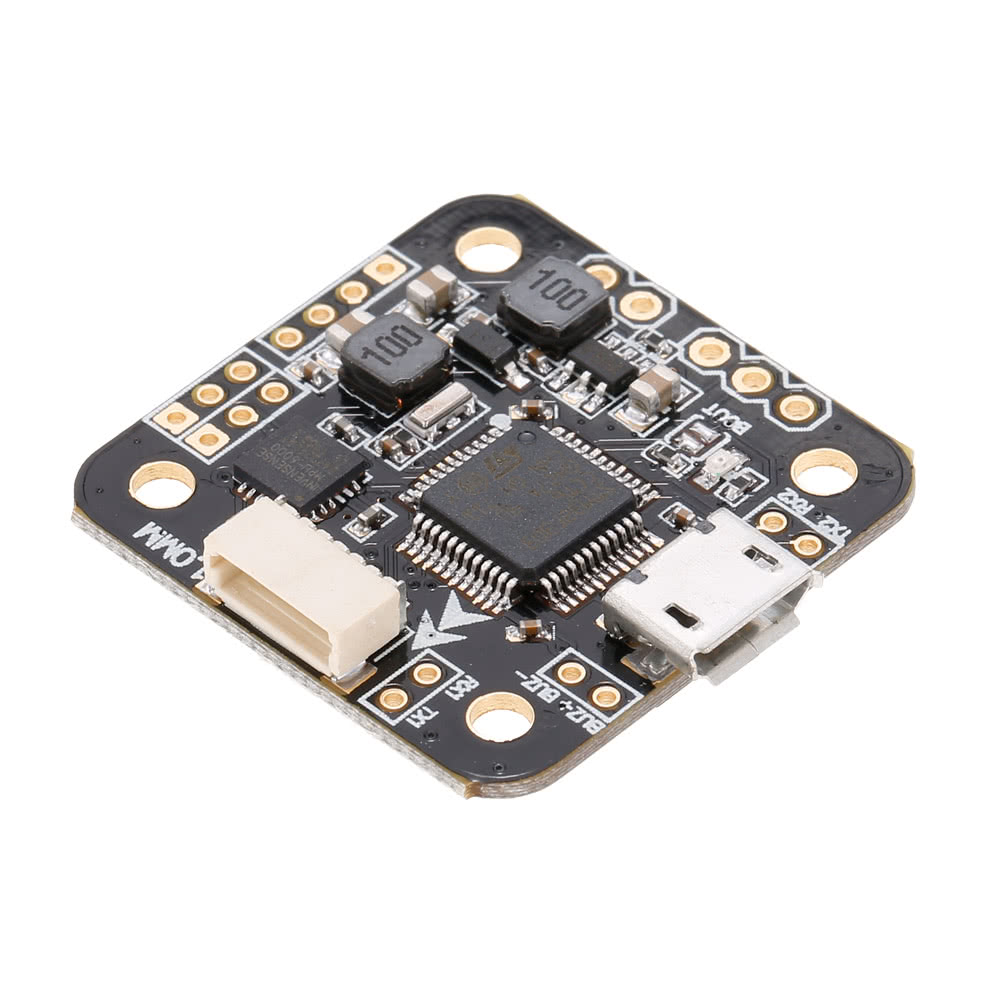
F3 Controlador de vuelo Mini Flytower Betaflight 20 * 20MM con OSD BEC 2S-4S para FPV Quadcopter



Precio:
US$
21.65
Cargando...
Enviar a:
if the goods arrival in 90 days,we will inform you by email!
Error appeared,Please try again later!
Preguntas y respuestas
Discusiones
Los foros de TOMTOP son una comunidad para comunicarse y ayudarse mutuamente. Habrá amigos entusiastas participando en tus discusiones. Desde luego, la respuesta del servicio de atención a clientes de TOMTOP (con el ícono de servicio de atención a clientes de TOMTOP) está garantizada que es la misma vía por la cual no contactarías en http://www.tomtop.com/contacts
abrir este foro en página completaAún no hay reseñas de este producto
Comparte tu opinión con otros clientes y obtén puntos Tomtop, las primeras 5 reseñas obtienen el DOBLE de puntos Tomtop
Escribir una reseña