

Passe o mouse sobre a imagem para ampliar
203.9
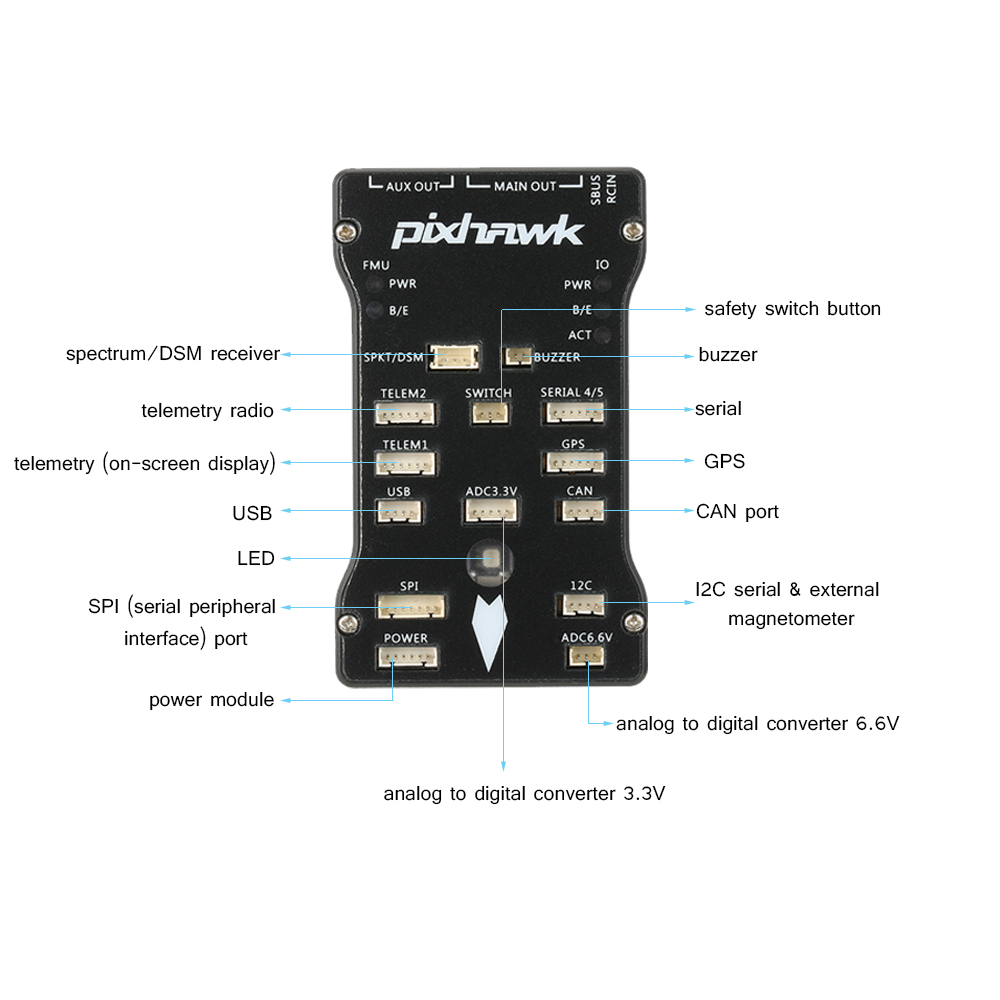
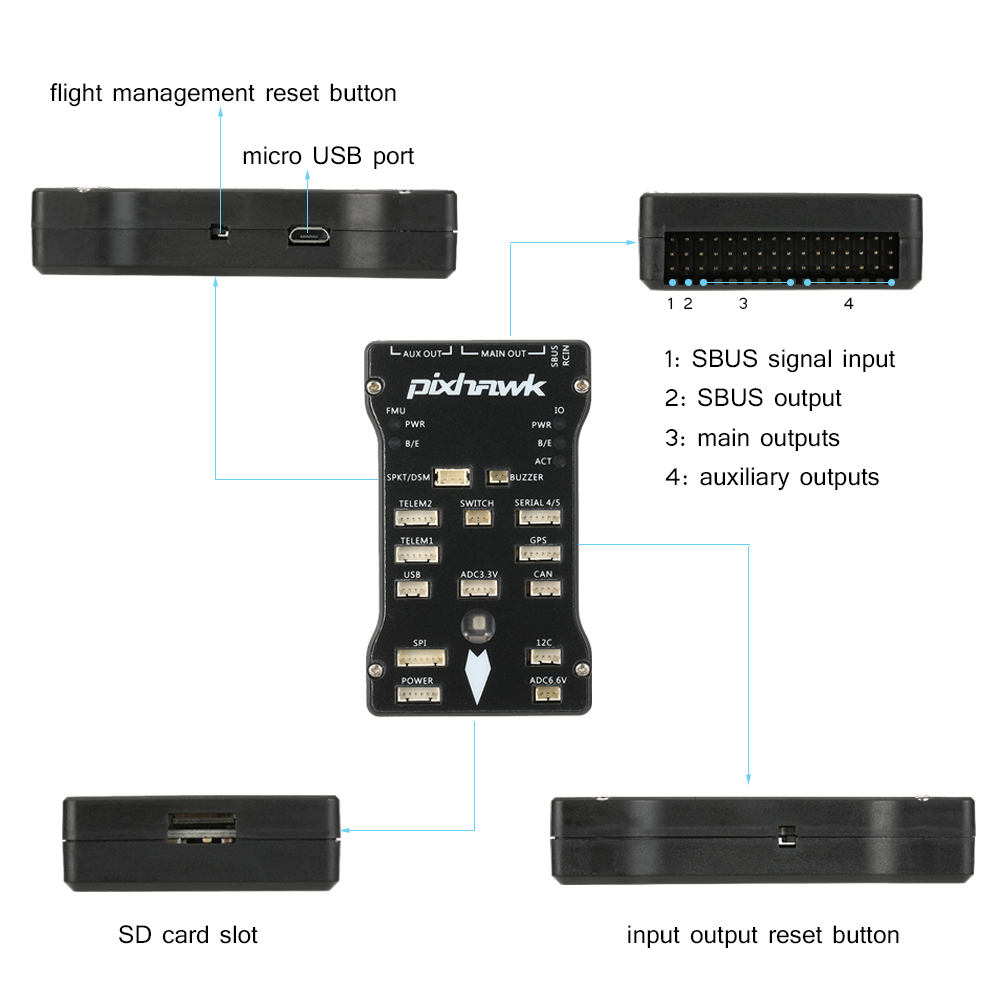
Pixhawk PX4 2.4.6 controlador de vôo NEO-M8N GPS Mini OSD 433Mhz Dados Transmision para DJI F450 F550 RC Quadrotor Muticopter Drone




















Preço:
US$
203.90
Carregando...
Enviar para
if the goods arrival in 90 days,we will inform you by email!
Error appeared,Please try again later!
Resposta da questão
Discussões
Por favor, note que o TOMTOP Forum é uma comunidade para troca de ideias e ajuda a procurar, durante o qual os entusiastas da tecnologia participarão na discussão, enquanto isso, o serviço de atendimento ao cliente da TOMTOP (com o ícone do serviço ao cliente Tomtop) será oportuno, com a mesma função que o contato em http : //www.tomtop.com/contacts
abra este fórum em página completaNão há comentários de clientes ainda.
Compartilhe seus pensamentos com outros clientes e obter TOMTOP Pontos, os primeiros 5 avaliações obter o dobro TOMTOP Pontos!
Escreva comentários de Cliente