

Mouse over to zoom in
18.63
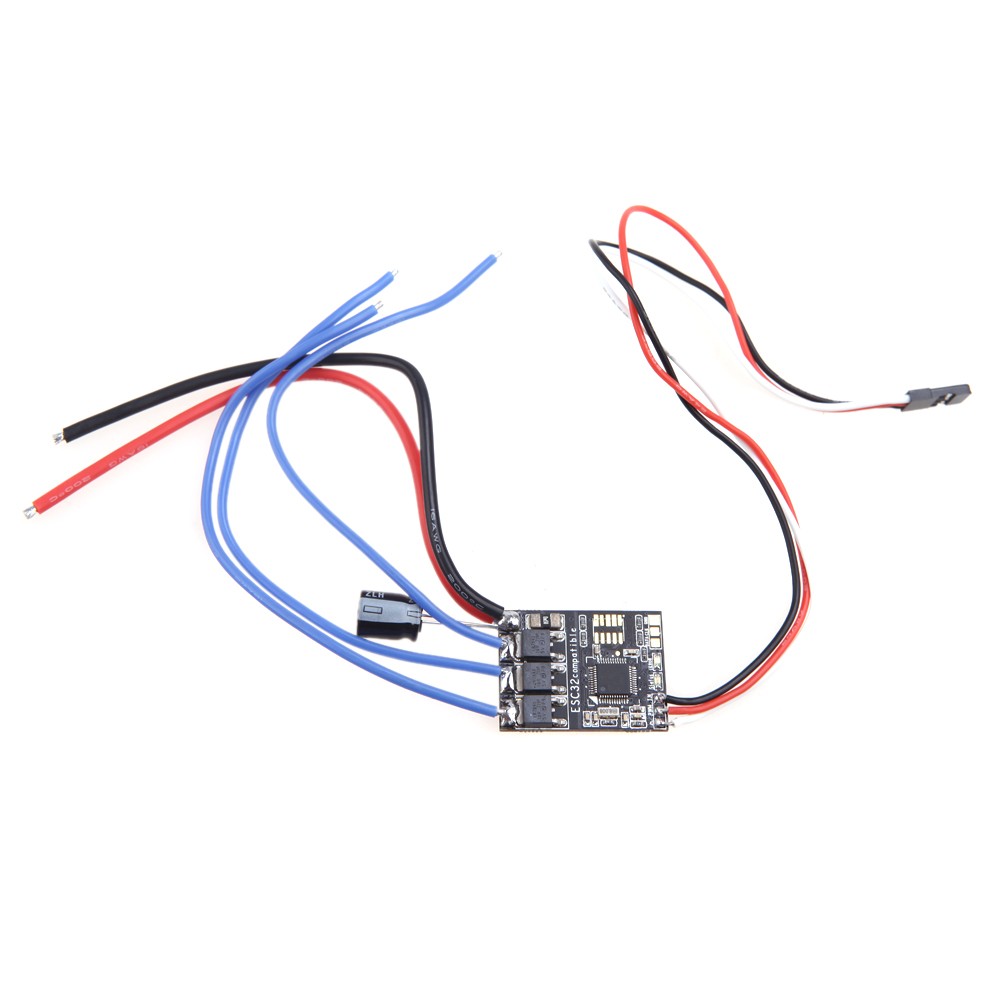
GoolRC AutoQuad ESC32 30A ESC 72MHz 32bit ARM electronic speed controller 7.4-18.5V 2S-5S for DJI F450 F550 Multicopter Qudcopter ESC Part (AutoQuad ESC32,DJI F450 F550 ESC,30A ESC)










Price:
US$
18.63
Loading...
Ship to
if the goods arrival in 90 days,we will inform you by email!
Error appeared,Please try again later!
Questions & Answers
Discussions
Please note that TOMTOP Forums are a community for all communicating and getting help each other. There will be some enthusiastic friends participate in your discussions. Of course TOMTOP customer service (with tomtop customer service icon) response is guaranteed ,which is the same way you contact us at http://www.tomtop.com/contacts
open this forum in full pageAverage Rating:
3.3based on 1 Customer Reviews
Share your thoughts with other customers and get Tomtop Points, the first 5 reviews get DOUBLE Tomtop Points!
Write a Customer ReviewBy o***9
April 21, 2015
