APM 2.8 V2.8 ArduPilot UAV フライト コント ローラー & ネオ-6 M ・ GPS アンテナ折り畳み式スタンド量・ パワー モジュール ・ 915 Mhz 無線テレメータ伝送
特徴:
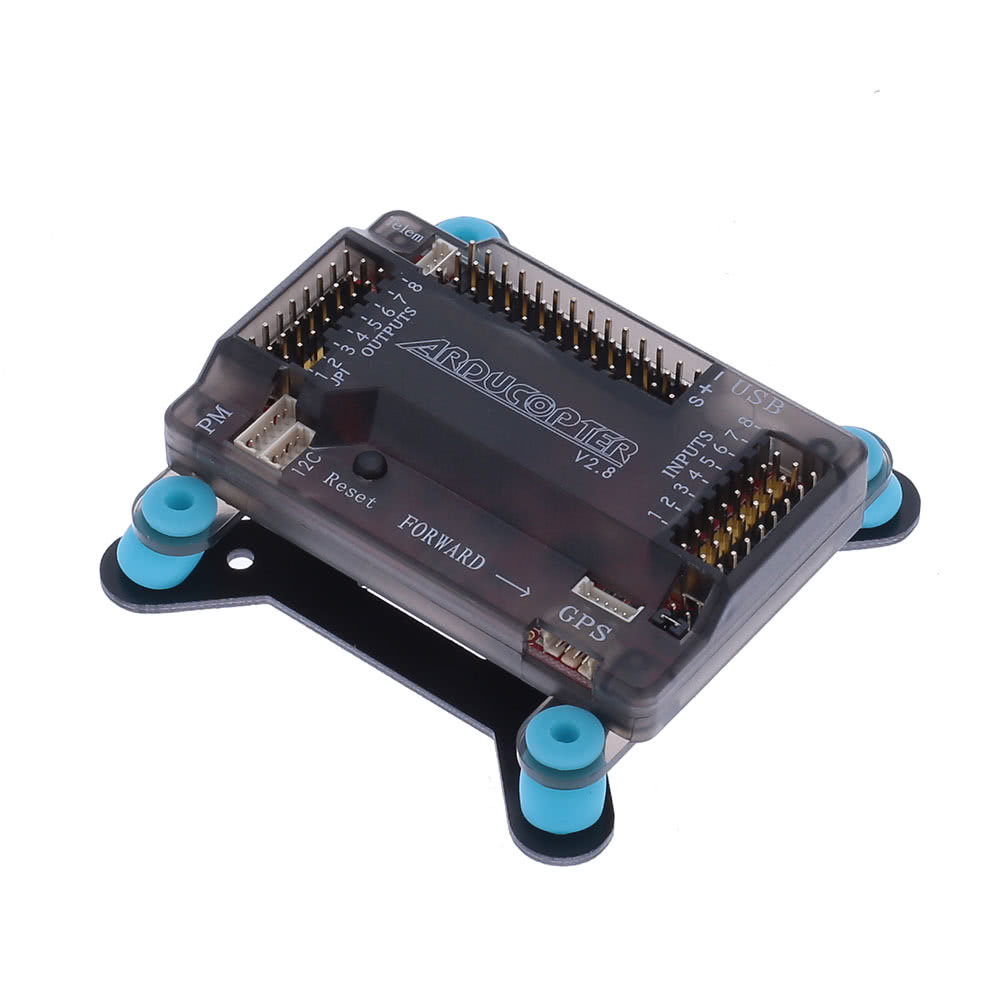
APM2.8 と GPS
導入:
新しい APM 2.8 自動操縦モジュールです。しかし、このバージョンはこのバージョンは multicopters の粗紡機との使用に最適、オンボードのコンパスを持っていません、センサーは APM2.5 + と同じが。
、APM 2.8 は、完全なオープン ソースの自動操縦システムと一流 2012年チャレンジ UAV アウトバック競争を獲得したベストセラー技術です。それは、完全自律車両に固定、回転翼またはマルチロータ車両 (偶数車とボート) を有効にするユーザーことができます。GPS ウェイ ポイントのミッションを行うことができるプログラム。上下左右のコネクタで使用できます。
このボードのリビジョンには、オンボードのコンパス、コンパスの磁気干渉を避けるために可能な限りパワーとモーターのソースから配置先の車両 (特に multicopters と粗紡機) のために設計されているがありません。(固定翼の航空機、多くの場合遠く離れた、これは、重要ではありませんが、APM 2.6 より柔軟に配置を与え、また彼らのために良い選択ですので、磁気の干渉を避けるために Esc とモーター マウント APM やすい)。これは 3 DR uBlox コンパスと GPS で使用される設計されています (下記のオプションを参照)、APM 自体よりも騒音源から遠い GPS/コンパス ユニットを取り付けることができるように。
特徴: Arduino 互換
トップ エントリをしることができます
ピン コネクタを垂直方向に取り付けるためまたはどちらか最後まで水平方向に
が含まれています 3 軸ジャイロ、加速度計、磁力計、ボードをオフに自動データロギング
オプションの高性能気圧計
オンボード 4 メガバイト Dataflash チップと一緒にの GPS、uBlox のコネクタをスライド側入力ピンとしてコンパス
リー-6 M モジュール インベン センス社の 6 を使用する最初のオープン ソースの自動操縦システムの 1 つ自由度加速度センサー/ジャイロMPU 6000
Barometric 圧力センサー測定料理
アトメルの ATMEGA2560 から MS5611-01BA03 にアップグレードし、処理と usb ATMEGA32U 2 チップ機能それぞれ
GPS 機能:
内蔵コンパス GPS モジュール
メイン チップ: 速度と高精度
APM シリアル ポートと互換性のある、I2C ポート
を検索高速衛星 Ublox-6 M
に丸いプラスチック製のシェルが含まれています、GPS サポート
3 DR 無線遠隔測定キット 915 Mhz
の説明:
3DRobotics 3 DR のラジオは、APM と地上局との間の遠隔接続をセットアップする理想的な方法です。小型、安価、偉大な範囲、3 DR のラジオは他のラジオで行うことができないことを行うことを可能にするオープン ソースのファームウェアを使用します。
ラジオ機能:
非常に小型サイズ
軽量 (下 4 グラム アンテナなし)
900 MHz または 433 MHz の亜種
-121 dBm
送信電力に受信感度で利用できる 20dBm 最大 (100 mw)
透明なシリアル リンク
空気データ レート最大 250 kbps
約 1 マイル
MAVLink プロトコル フレーミングとステータス レポートの
周波数ホッピングの範囲普及スペクトル (FHSS)
適応時間分割多重 (TDM)
LBT、AFA の
のサポート 誤り訂正符号に建てられた設定可能なデューティ サイクル
(25% までを修正することができますデータ ビット エラー) リモート ラジオ構成
APM
HopeRF HM TRP ラジオ モジュールに基づいてを使用する適応的フロー制御のラジオ構成
RT コマンドのコマンドでさら範囲
オープン ソースのファームウェア
用双方向増幅器で
で実証された小さなオムニ アンテナ
と数キロの範囲を使用できます。、SiLabs Si1000 RF マイコンを搭載します。
MAVLink OSD V2.0
紹介
MAVLink OSD 基づく Arduino プロジェクトは、元 MinimOSD と完全に互換性があります。クレイオス AIOP と Arduflyer のこの掲示板を使用できる
/ArduPilot メガ。
MAVLink OSD スイッチング DC/DC ステップ ダウン電源電源システムの効率を最大化します。これ以上加熱の問題この OSD 基板を使用する場合。
既定の OSD ファームウェアは記入しないトート MinimOSD 余分なです。OSD 機能のセットアップにコンフィギュレーター ツールを使用する方法について
: ここをクリックして
ハードウェア (元 MinimOSD Wiki) をセットアップする方法: をクリックしてここで
電源モジュールは、LiPo バッテリーからクリーンな電力消費とバッテリーのと同様に、現在の電圧測定について、6 P ケーブルを通して APM/Arduflyer を提供する簡単な方法。オンボードのスイッチング ・ レギュレータの出力から 5.3 v、7 s LiPo バッテリーまでから 3 a の最大。
注: パワー モジュールの電源に APM/Arduflyer、RC 受信機および付属品 (GPS、無線テレメトリー) 専用です。それはサーボに電源設計されていません。航空機の使用そのため ESC/BEC を所有します。
ハードウェア機能:
ATMEGA328P マイコン
MAX7456 EUI モノクロ画面表示
MAX7456 EUI
動作電圧 5 v/500 ma DC/DC レギュレータ: 5V(FTDI connector) と 12 v (ビデオ I/O コネクタ)
サポート NTSC ・ PAL
ftdi 社コネクタ
ソフトウェア機能:
フル MAVLink プロトコル サポート
グラフィカル コンフィギュレーター ツール
APM Arduflyer 電源モジュール V1.0
導入:
電源モジュールと同様に、現在の消費とバッテリー電圧測定、
パッケージ情報 LiPo バッテリーからクリーンな電力で APM/Arduflyer を提供する簡単な方法は、:
パッケージ サイズ: 19 * 10 * 5 cm/7.6 * 4 * 2 で
パッケージ重量: 190 g/6.7 oz
接着剤タップ パッケージ
パッケージ リスト:
1 * APM 2.8 V2.8 ArduPilot
1 * ネオ-6 M
1 * GPS アンテナ
1 * パワー モジュール
1 * 915 Mhz 3 DR