APM 2.8 V2.8 ArduPilot UAV vuelo controlador & Neo - 6M y GPS antena plegable soporte cantidad y módulo de potencia y 915Mhz Radio telemetría transmisión
características:
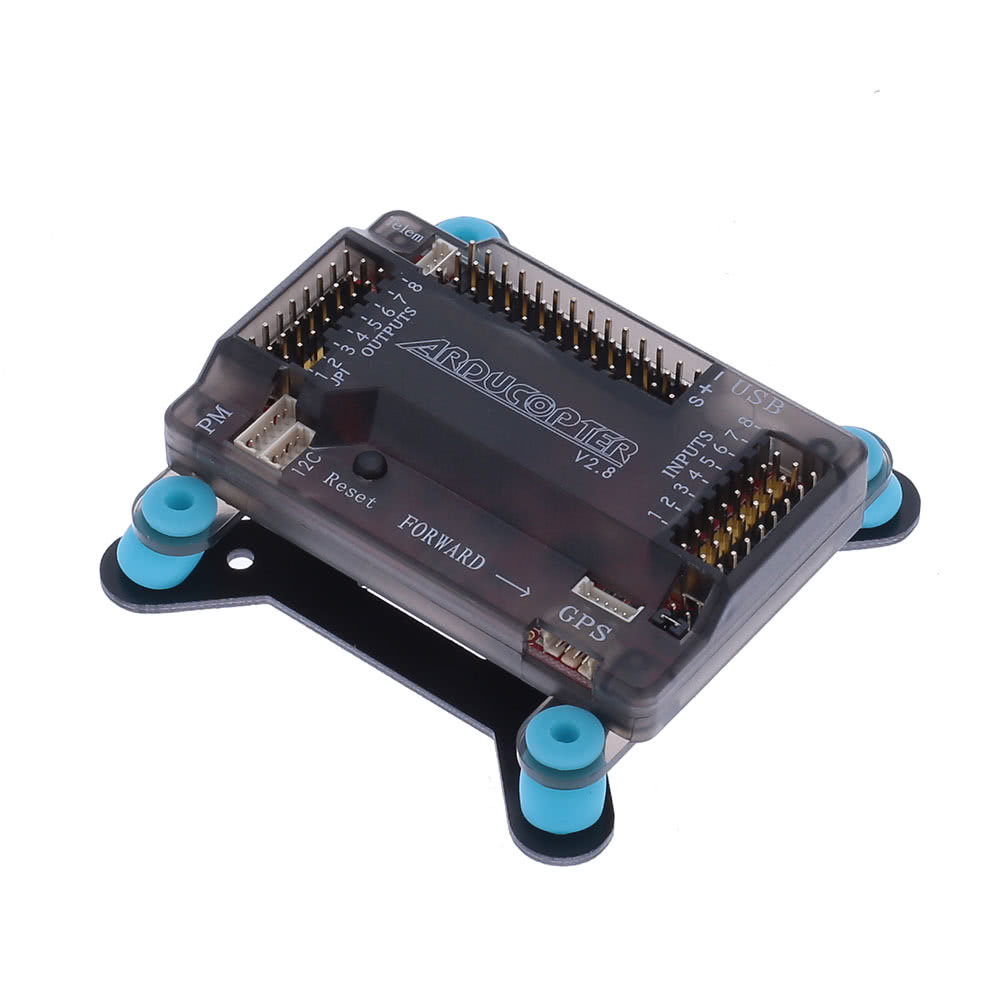
APM2.8 y GPS
Introducción:
este es el nuevo módulo de piloto automático 2.8 APM. Los sensores son exactamente iguales a los de APM2.5 +, sin embargo esta versión no tiene una brújula a bordo, que hace esta versión ideal para su uso con multicopters y rovers.
el 2.8 de la APM es un sistema de piloto automático completo de código abierto y la tecnología Best seller que ganó el prestigioso concurso de Outback Challenge UAV de 2012. Permite al usuario convertir cualquier vehículo multirotor (incluso coches y barcos) o ala fija y rotativa en un vehículo totalmente autónomo; capaz de realizar programa misiones GPS con puntos de referencia. Disponible con conectores superior o laterales.
esta revisión de la Junta no tiene brújula a bordo, que está diseñado para los vehículos (especialmente multicopters y rovers) donde la brújula debe colocarse lo más lejos de poder y fuentes motor como sea posible para evitar interferencias magnéticas. (En las aeronaves de ala fija a menudo es más fácil de montaje APM lo suficientemente lejos de los motores y los ESCs para evitar interferencias magnéticas, así que esto no es tan crítico, pero APM 2.6 proporciona más flexibilidad en ese posicionamiento y es una buena opción para ellos, también). Esto está diseñado para ser utilizado con el DR 3 uBlox GPS con brújula (ver opción de abajo), para que la unidad GPS/Brújula puede montarse lejos de fuentes de ruido que APM sí mismo.
características:
compatible con Arduino puede pedirse con entrada superior pernos para fijar conectores verticalmente, o como pines de entrada de lado se deslice los conectores en extremo horizontal
incluye giroscopio de 3 ejes, acelerómetro y magnetómetro, junto con un chip de a bordo 4 MegaByte Dataflash
barómetro de alto rendimiento para registro de datos automático
opcional independiente GPS, uBlox LEA - 6 M módulo brújula
uno de los primeros sistemas de piloto automático de código abierto para usar 6 de Invensense DoF acelerómetro/giroscopio MPU-6000
barométrica presión sensor actualizado a MS5611-01BA03, de ATMEGA2560 de medición especialidades
Atmel y ATMEGA32U-2 chips para el procesamiento y usb respectivamente funciones
GPS características:
incorporado GPS brújula módulo
principal chip:
Ublox - 6M con satélite rápido buscando velocidad y alta precisión
Compatible con puerto serie APM y I2C puerto
incluye cáscara plástica redonda y GPS soporte
3DR Radio telemetría Kit 915Mhz
Descripción :
la 3DRobotics DR 3 Radio es la forma ideal para configurar una conexión de la telemetría entre la APM y una estación de tierra. Pequeño, barato y con gran variedad, el DR 3 utiliza un firmware de código abierto que nos permite hacer cosas que no se puede hacer con otras radios.
Radio características:
muy tamaño pequeño
peso ligero (menos de 4 gramos sin la antena)
disponible en variantes de 900MHz o 433MHz
sensibilidad del receptor a-121 dBm
potencia de transmisión hasta 20dBm (100mW)
enlace serial transparente
datos aire precios hasta 250 kbps
gama de aproximadamente 1 milla
MAVLink protocolo enmarcado y estado informes
Frequency hopping spread spectrum (FHSS)
tiempo adaptativo división multiplexing (TDM)
apoyo a
LBT y AFA Ciclo de trabajo configurables
construido en código de corrección de errores (puede corregir hasta un 25% datos bits de error)
demostrado alcance de varios kilómetros con un pequeño omni antena
puede ser utilizado con un amplificador bidireccional para aún más variedad
Open source firmware
en comandos para
RT comandos de configuración de radio para radio control remoto configuración
control de flujo adaptativo cuando se utiliza con APM
basado en el módulo de radio de HopeRF HM-TRP , con un microcontrolador SiLabs Si1000 RF.
V2.0 MAVLink-OSD
introducción
MAVLink-OSD es un proyecto basado en Arduino y es totalmente compatible con MinimOSD original.
este tablero puede ser utilizado para AIOP CRIUS y Arduflyer / ArduPilot Mega.
MAVLink-OSD con la conmutación de alimentación de DC/DC paso descendente para maximizar la eficiencia en el sistema eléctrico. No más problemas de calentamiento cuando se utiliza este tablero OSD.
Firmware OSD por defecto es MinimOSD-Extra, escrito por Gábor Zoltán.
acerca de cómo utilizar la herramienta de configuración para configuración función OSD: clic aquí
Cómo configurar hardware (original MinimOSD Wiki): haga clic aquí
módulo de potencia es una forma sencilla de proporcionar su APM/Arduflyer con energía limpia de una batería de LiPo, así como consumo y batería voltaje medidas de corriente, todo a través de un cable de 6 P. El regulador de conmutación a bordo salidas 5.3V y un máximo de 3A de hasta una batería de LiPo de 7 años.
Nota: el módulo de alimentación está diseñado sólo para APM/Arduflyer, un receptor RC y accesorios (GPS, telemetría de Radio). No está diseñado para servos de potencia. Usa su avión propio ESC/BEC para ello.
características de Hardware:
ATMEGA328P microcontrolador
MAX7456 EUI monocromo pantalla
regulador de DC/DC de 5V/500mA para MAX7456-EUI
voltaje de funcionamiento: 5V(FTDI connector) y 12V (conectador de la entrada-salida de Video)
admite NTSC y PAL
FTDI conector
Software características:
MAVLink completo protocolo apoyo
configurador gráfico herramienta
APM Arduflyer potencia módulo V1.0
introducción :
módulo de potencia es una forma sencilla de proporcionar su APM/Arduflyer con energía limpia de una batería de LiPo, así como consumo y batería voltaje medidas de corriente,
información del paquete:
tamaño del paquete: 19 * 10 * 5 cm/7.6 * 4 * 2 en
Paquete peso: 190g / 6.7 oz
adhesivo grifos de paquete
lista de paquetes:
1 * APM 2.8 V2.8 ArduPilot
1 *
Neo - 6 M 1 * antena GPS
1 * módulo
1 * 915 Mhz 3 DR