APM 2.8 v2. 8 ArduPilot UAV Flight Controller & Neo - 6M & GPS Antenne klappbar Stand Betrag & Leistungsmodul & 915Mhz Radio Telemetrie-Transmision
Features:
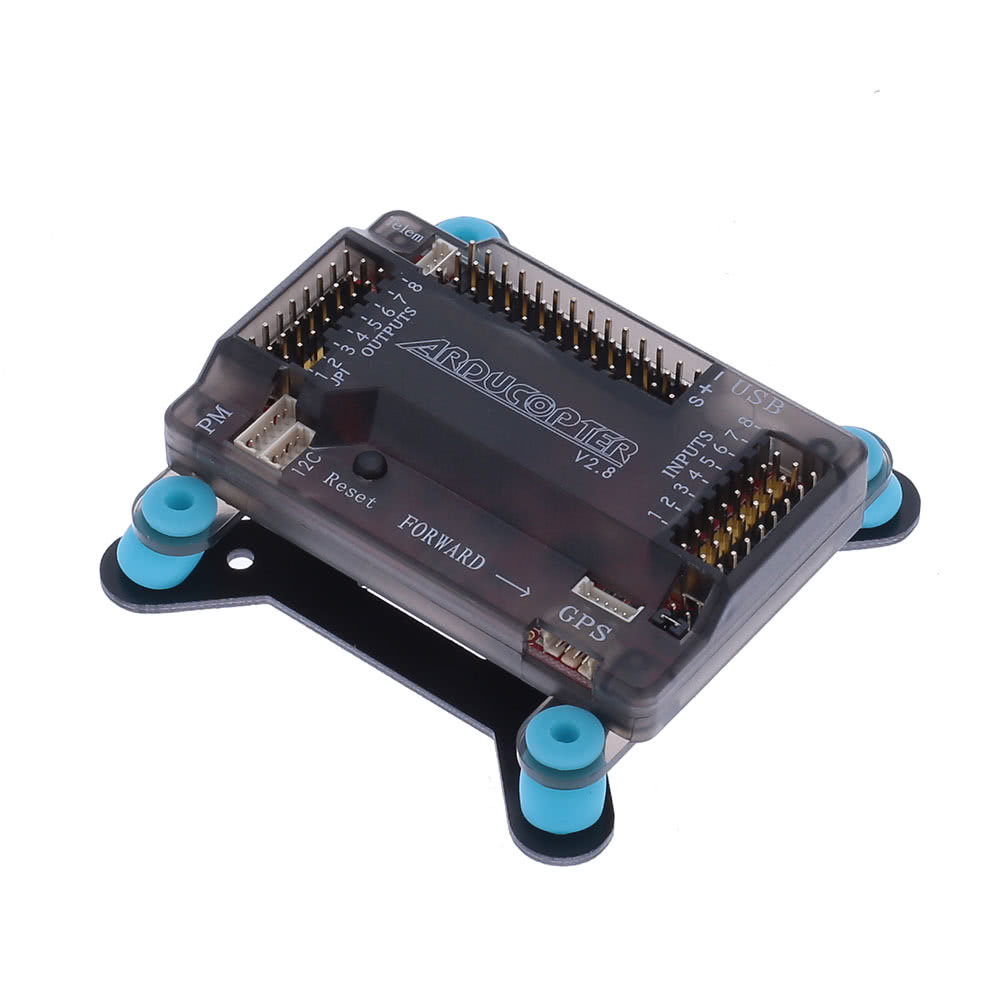
APM2.8 und GPS
Einführung:
Dies ist das neue APM 2.8-Autopilot-Modul. Die Sensoren sind genau das gleiche wie mit APM2.5 +, aber diese Version nicht über einen integrierten Kompass, verfügt macht diese Version ideal für den Einsatz mit Multicopters und Rovers.
der APM-2.8 ist eine vollständige open-Source-Autopilot-System und die Bestseller-Technologie, die den renommierten 2012 Outback Challenge UAV-Wettbewerb gewonnen. Es erlaubt dem Benutzer, eine feste, rotierende Flügel oder multirotor Fahrzeug (sogar Autos und Boote) in eine vollständig autonome Fahrzeug zu verwandeln; durchführen kann, programmiert GPS Missionen mit Wegpunkten. Mit oberen oder seitlichen Anschlüssen erhältlich.
hat diese Revision des Boards kein integrierter Kompass, das für Fahrzeuge (vor allem Multicopters und die Rovers) soll bei der Kompass so weit von macht und motor Quellen wie möglich um magnetische Interferenzen zu vermeiden platziert werden. (Auf Flugzeuge ist es oft einfacher zu Berg APM weit genug weg von den Motoren und WSR magnetischen Störungen zu vermeiden, so dies nicht so kritisch ist, aber APM 2.6 bietet größere Flexibilität beim bereit, Positionierung und ist eine gute Wahl für sie, auch). Dies soll mit der 3DR uBlox GPS mit Kompass verwendet werden (siehe weiter unten), so dass die GPS-Kompass-Einheit weiter von Lärmquellen als APM selbst montiert werden kann.
Features:
Arduino kompatibel mit oberster Eintrag bestellt werden pins für Anschlüsse vertikal anfügen oder als Seite Eintrag Pins für Ihre Anschlüsse in Folie entweder horizontal-end
umfasst 3-Achsen Gyro, Beschleunigungsmesser und Magnetometer, zusammen mit einem Hochleistungs-Luftdruck
Onboard 4 MegaByte Dataflash Chip für automatische Datalogging
Optional Offboard-GPS, uBlox LEA - 6 M-Modul mit Kompass
eins der ersten open-Source-Autopilot-Systeme Invensenses 6 verwenden DoF Beschleunigungssensor/Gyro MPU-6000
barometrischer Drucksensor, MS5611-01BA03, ein Upgrade von Measurement Specialties
Atmels ATMEGA2560 und ATMEGA32U-2-Chips für Verarbeitung und Usb Funktionen bzw.
GPS-Funktionen:
eingebauten Kompass GPS Modul
Main Chip: Ublox - 6M
mit schnellen Satelliten suchen, Geschwindigkeit und hohe Präzision
kompatibel mit serieller Schnittstelle, APM und I2C Port
enthält Runde Kunststoffschale und GPS Unterstützung
3DR Funk-Telemetrie-Kit 915Mhz
Beschreibung :
3DRobotics 3DR Radio ist der ideale Weg um eine Telemetrie-Verbindung zwischen Ihrem APM und einer Bodenstation herzustellen. Klein, preiswert und mit großer Reichweite, verwendet das 3DR Radio eine open-Source-Firmware, die ermöglicht es uns, Dinge tun, die mit anderen Radios nicht erfolgen kann.
Radiofeatures:
sehr klein
geringes Gewicht (unter 4 Gramm ohne Antenne)
erhältlich in 900MHz oder 433MHz Varianten
Empfängerempfindlichkeit zu-121 dBm
Sendeleistung bis zu 20dBm (100mW)
transparente serielle Verbindung
Air Daten Preise bis zu 250 KBit/s
Palette von ca. 1 Meile
MAVLink Protokoll Rahmung und Statusberichte
Frequenzsprung Verbreitung Spektrum (FHSS)
Adaptive Zeit Division multiplexing (TDM)
Unterstützung für LBT und AFA
Konfigurierbare Pflicht Zyklus
erbaute Fehler korrigieren Code (kann bis zu 25 % korrigieren Daten bit Störungen)
demonstrierte Reichweite von mehreren Kilometern mit einer kleinen Omni Antenne
verwendbar mit einem Bi-direktionale-Verstärker für noch mehr Reichweite
OpenSource Firmware
AT-Kommandos für Radio
RT Konfigurationsbefehle für Submarine Konfiguration
Adaptive Flusskontrolle mit APM
basiert auf dem HopeRF HM-TRP-Funkmodul , mit einem SiLabs Si1000 RF-Mikrocontroller.
MAVLink-OSD v2. 0
Einführung
MAVLink-OSD ist ein Arduino-Basis-Projekt, und es ist voll kompatibel mit original MinimOSD.
dieses Board sich für CRIUS AIOP und Arduflyer eignet / ArduPilot Mega. MAVLink-OSD
mit Umschaltung DC/DC Stufentiefe Powersupply zur Maximierung der Effizienz auf Power-System. Keine weitere Heizung Probleme bei der Verwendung dieses OSD-Board.
Standard OSD-Firmware ist MinimOSD-Extra, von Gábor Zoltán geschrieben.
zum Konfigurator-Tool Setup OSD-Funktion verwenden: hier
wie setup Hardware (original MinimOSD Wiki): Klicken Sie hier
Power-Modul ist eine einfache Möglichkeit, Ihre APM/Arduflyer mit sauberen Strom von einem LiPo-Akku, alle durch ein 6p-Kabel ebenso wie aktuelle Verbrauch und die Batterie Spannungsmessungen. Der on-Board-switching Regulator 5.3V und maximal 3A von bis zu 7 s LiPo Batterie ausgegeben.
Hinweis: The Powermodul dient nur APM/Arduflyer, einen RC-Empfänger und Zubehör (GPS, Radio Telemetrie) an die macht. Es dient nicht zum Power-Servos. Verwenden Sie Ihr Flugzeug ESC/BEC dafür besitzen.
verfügt
Hardwarefeatures:
ATMEGA328P Microcontroller
MAX7456-EUI Monochrom Bildschirmanzeige
5V/500mA DC/DC-Steller für MAX7456-EUI
Betriebsspannung: 5V(FTDI connector) und 12V (Video i/o-Anschluss)
unterstützt NTSC & PAL
FTDI Connector
Softwarefunktionen:
voll MAVLink Protokoll Unterstützung
grafischen Konfigurator-Tool
APM Arduflyer Power Modul v1. 0
Einführung :
Power-Modul ist eine einfache Möglichkeit, Ihre APM/Arduflyer mit sauberen Strom von einem LiPo-Akku auch als aktuelle Verbrauch und die Batterie und Spannungsmessungen,
Paketinformationen:
Paketgröße: 19 * 10 * 5 cm/7,6 * 4 * 2 in
Paketgewicht: 190g / 6.7 oz
Kleber Armaturen Paket
Paketliste:
1 * APM 2.8 v2. 8 ArduPilot
1 * Neo - 6 M
1 * GPS Antenne
1 * Powermodul
1 * 915 Mhz 3DR