

Maus zum Vergrößern
18.63
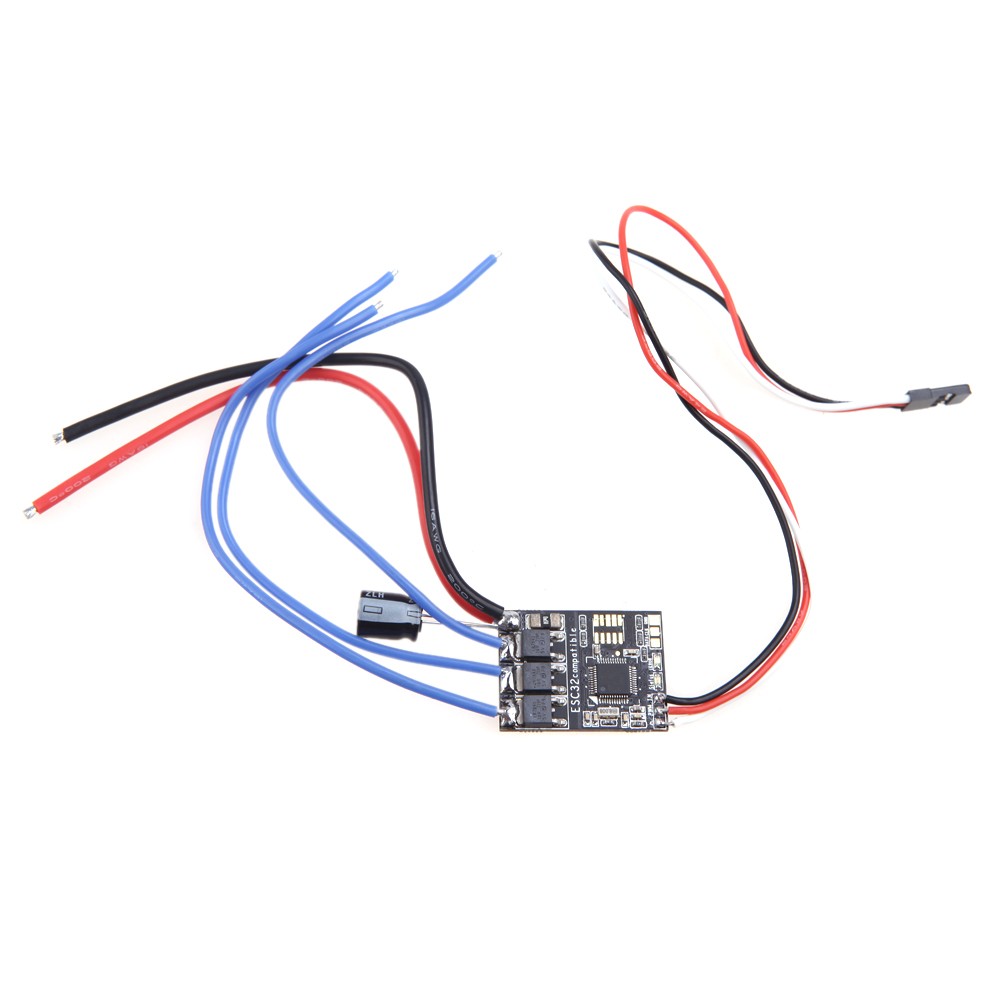
GoolRC Autoquad ESC32 30A ESC Regler 72 MHz 32-Bit-ARM elektronische Drehzahlregler 7.4-18.5V 2S-5S für DJI F450 F550 Multicopter Qudcopter ESC Part (Autoquad ESC32, DJI F450 F550 ESC, 30A ESC)










Preis:
US$
18.63
Diese Seite wird jetzt geladen....
Ausliefern
if the goods arrival in 90 days,we will inform you by email!
Error appeared,Please try again later!
Frage Antwort
Diskussionen
Bitte beachten Sie, dass TOMTOP Forum eine Community für Ideenaustausch und Hilfe sucht, bei denen Tech-Enthusiasten an der Diskussion teilnehmen werden, mittlerweile wird TOMTOP Kundenservice (mit Tomtop Kundenservice-Symbol) rechtzeitig reagieren, mit der gleichen Funktion wie der Kontakt auf http : //www.tomtop.com/contacts
Öffne dieses Forum in voller SeiteEs gibt keine Kundenrezensionen noch.
Sagen Sie Ihre Meinung mit anderen Kunden und erhalten Tomtop Punkte, die ersten 5 Bewertungen bekommen DOUBLE Tomtop Punkten!
Schreiben Sie eine Rezension